salut
je débute dans la programmation de module
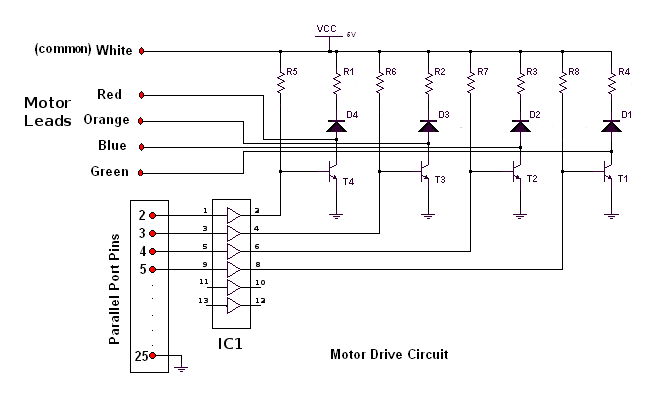
j’aimerais faire un driver de moteur sur le port parallèle
c-a-d envoyer un train d’impulsions sur une pin du port
c’est quelque chose que j’ai déjà fait (et dont j’ai déjà parlé sur ce forum) depuis l’user space en utilisant la RTC et en commandant le port avec ioctl
maintenant j’aimerais passer au stade supérieur : le module au noyau qui me permet de recupérer des timers rapides (entre autre) et de faire ca bien propre
avant de penser à coder j’ai entamé un (long) travail de lecture de doc, essentiellement sur
http://www.tldp.org
et notemment "The Linux Kernel Module Programming Guide"
http://www.tldp.org/LDP/lkmpg/2.6/html/index.html
Je commence à me faire une idée de comment pourrait fonctionner mon driver : je créerais un device /dev/stepmotor et je lui parlerais avec ioctl depuis n’importe quelle appli
Ca OK j’ai compris
Il me reste à comprendre comment accéder au port depuis mon module (ioctl ne doit pas être la bonne soluce) puis comment accéder à des timers rapides
puis tout ce que je n’ai pas encore envisagé
étant donné que la lecture des includes du noyau n’est pas tres facile sans exemple je pensais rentrer dans le code de drivers de périphériques du port parallèle afin de me familiariser avec ce type de prog sur des codes bien faits
juste une petite question : que me conseilleriez vous comme driver à analyser ? ou comme doc supplémentaire ?
et puis : est-ce que certains d’entre vous auraient suffisemment de recul, de temps et d’intérêt pour juger mon code lorsque je le presenterai ?
je pensais balancer l’URL ou se trouveront mes sources ou alors (si cela est possible) balancer ca directement sur le forum
de cette manière tout le monde pourra donner des mains à sa debian




 .
.